Witam wszystkich.
Wykonałem sobie stację lutowniczą ,jednak natknąłem się na problemy związane z opóźnieniem pętli głównej. Zacznę od sposobu funkcjonowania stacji.
Do nóżek uC atmega 16 pd.3-5 został podpięty Max6675(interfejs spi), który według zamierzeń projektu ma odmierzać temperaturę co 200ms .Zmierzona temperatura jest porównywana z zadaną i ich różnica jest zapisywana do zmiennej odchyłka, dzięki której jest dobierana moc grzałki.Ta zaś zostanie wykorzystana do regulatora mocy PWM.W projekcie zastosowano Encoder z przyciskiem ,umożliwiając nastawienie temperatury zadane. Moja koncepcja jest następująca : w pętli głównej znajduje się opóźnienie 1Ms(tak aby obsłużyć encoder i przycisk oraz regulator mocy PWM , który liczy do 100 dając 1S) oraz licznik liczący do 200 (pomiar temp. co 200ms).
Problem w ,tym że pomiar temperatury jest znacznie opóźniony o kilka sekund natomiast obsługa encodera oraz przycisku jest dobra.Z ciekawości wyeliminowałem licznik liczący do 200 i zmieniłem opóźnienie z 1 ms na 200ms pomiar był prawidłowy ,lecz encoder gubił impulsy ,a generator PWM działał nieprawidłowo

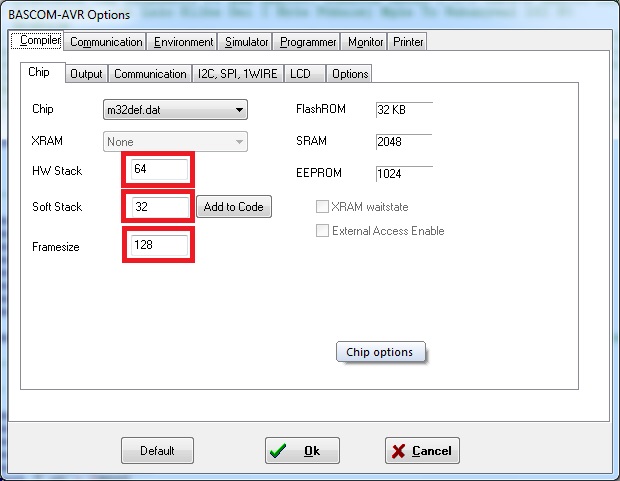
. Desperacko nawet zmieniłem licznik do pomiaru temp. na pętle for ... next ,w której było opóźnienie 1 ms oraz sprawdzanie encodera i przycisku oraz regulacja mocy (pętla liczyła od 0 do 200) , poza pętlą pomiar temperatury, który był również opóźniony o kilka sekund.Dopiero skrócenie pętli for ...next od 0 do 6 dało zamierzony efekt ,lecz tylko na ok 1 min po ,czym stacja grzała "do oporu". Fuse bity ustawione i odczytane (hfuse:C9; lfuse:FF) na pracę z zewnętrznym kwarcem 16Mhz.
Bardzo proszę o porady, gdyż mam niewielkie doświadczenie w programowaniu i ciągle się uczę

$regfile = "m16def.dat"
$crystal = 16000000
Dim Maxdata As Word
Dim T_nastawy As Word
Dim Uspienie As Bit
Const T_uspienia = 150
Dim S_pomoc As Bit
Dim Stan_encoder As Byte
Dim T_grota As Word
Dim Odchylka As Integer
Dim Flaga_t As Bit
Dim Licznik_t As Word
Dim Moc As Byte
Dim Licznik_imp As Byte
Config Pind.2 = 1
Config Pind.4 = 0
Config Pind.5 = 1
Config Pind.3 = 1
Config Pind.0 = 0
Config Pinb.6 = 0
Config Pinb.7 = 0
Config Pind.7 = 1
Config Portc = &B11111111
Portd.3 = 1
Portd.5 = 0
Portd.4 = 1
Portd.7 = 0
Portd.0 = 1
Portb.7 = 1
Portb.6 = 1
Portd.2 = 1
T_nastawy = 150
Portc = 255
Config Spi = Soft , Din = Pind.4 , Dout = Pind.3 , Ss = None , Clock = Pind.5
Config Lcd = 16 * 2
Config Lcdpin = Pin , Db4 = Portb.0 , Db5 = Portb.1 , Db6 = Portb.2 , Db7 = Portb.3 , E = Portb.4 , Rs = Portb.5
Deflcdchar 1 , 7 , 5 , 7 , 32 , 32 , 32 , 32 , 32
So Alias Pind.4
Sck Alias Portd.5
Cs Alias Portd.3
Buzzer Alias Portd.7
Grzalka Alias Portd.2
Cls
Cursor Off
Lcd "Stacja by David"
Lowerline
Lcd "With BASCOM AVR"
Waitms 500
Buzzer = 1
Waitms 1500
Buzzer = 0
Cls
Do
Waitms 1 'opóznienie(odświeżnie) 1MS
Incr Licznik_t 'licznik pomiaru temp co 200MS
If Licznik_t = 200 Then
Licznik_t = 0
Cs = 0
Shiftin So , Sck , Maxdata , 0 , 16
Cs = 1
End If
T_grota = Maxdata 'otrzymanie tem. w stopniach
Shift T_grota , Right , 3
T_grota = T_grota / 4
'obsługa przycisku usypiania
Debounce Pind.0 , 0 , Slep , Sub
Stan_encoder = Encoder(pinb.6 , Pinb.7 , Lewo , Prawo , 0) 'zwiększnie zmniejszanie TEMP.
If S_pomoc = 1 Then
S_pomoc = 0
If Uspienie = 1 Then
Buzzer = 1
Wait 1
Buzzer = 0
T_nastawy = T_uspienia
Display Off
Else
Buzzer = 1
Wait 1
Buzzer = 0
Display On
End If
End If
Incr Licznik_imp 'regulacja mocy PWM
If Licznik_imp = Moc Then
Set Grzalka
End If
If Licznik_imp = 100 Then
Licznik_imp = 0
End If
If Licznik_imp = 0 Then
If Moc <> 0 Then
Reset Grzalka
End If
End If
Reset Odchylka
Odchylka = T_nastawy - T_grota 'porónanie temeratury zadanej i
Select Case Odchylka
Case Is <= 0
Moc = 0
Portc = 255
Case 1 To 4
Moc = 10
Portc = 127
Case 5 To 15
Moc = 15
Portc = 63
Case 16 To 20
Moc = 20
Portc = 31
Case 21 To 30
Moc = 25
Portc = 15
Case 31 To 45
Moc = 30
Portc = 7
Case 46 To 55
Moc = 45
Portc = 3
Case 56 To 99
Moc = 75
Portc = 1
Case Is >= 100
Moc = 100
Portc = 0
End Select
If Maxdata.2 = 0 Then 'procedura wyświetlania danych na LCD
Locate 1 , 1
Lcd "T.GROTA:" ; T_grota ; Chr(1) ; "C " ; " "
Lowerline
Lcd "T.NASTAWY:" ; T_nastawy ; Chr(1) ; "C" ; " "
Else
Locate 1 , 1
Lcd "Awaria Kolby!!" ; " "
Lowerline
Lcd " "
End If
If T_nastawy = 451 Then
T_nastawy = 450
End If
Loop
End
Lewo: ' Podprogramy
Decr T_nastawy
Return
Prawo:
Incr T_nastawy
Return
Slep:
Set S_pomoc
Toggle Uspienie
Return